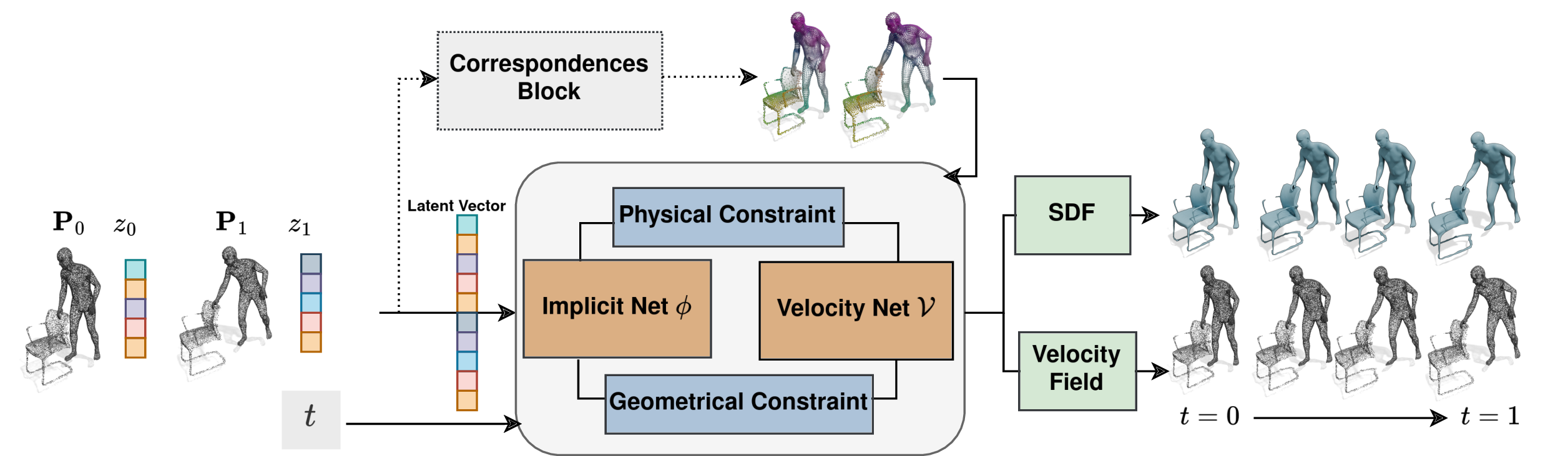
Pipeline of 4Deform: Given a temporal sequence of inputs, we initialize a latent vector to each point cloud. Then the network takes pairs of point clouds \(P_0\) and \(P_1\) (with sparse correspondences), together with the concatenated latent vector \(\mathbf{z}_0\) and \(\mathbf{z}_1\) as input. At training time, we jointly optimize two neural fields: a time-varying implicit representation (Implicit Net \(\phi\)) and a velocity field (Velocity Net \(\mathcal{V}\)) with proposed geometric and physical constraints losses. Conditioning on a time stamp \(t\), we instantaneously obtain a continuous time-varying signed distance function (SDF), an offset of the input toward the target (velocity field).
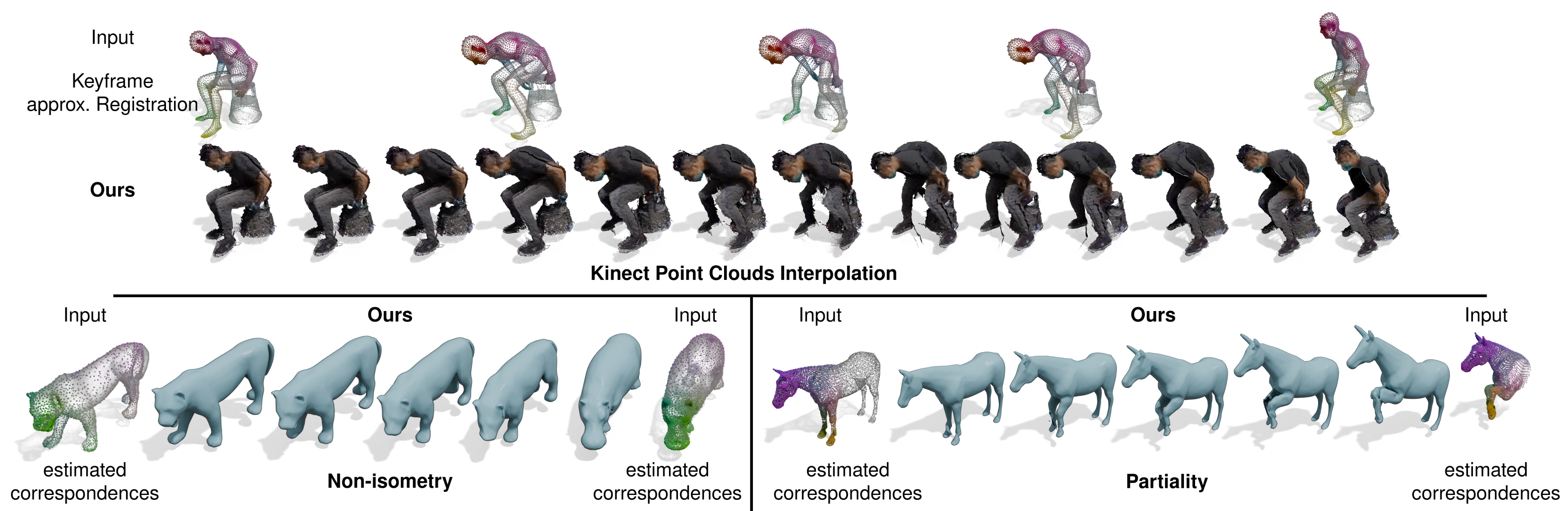
Real-world Dataset Upsampling
Backpack Back
Approximated Registration Inferring Input
Kinect Point Cloud Our Output
Interpolated Mesh Our Output
Interpolated Kinect PC
Largebox
Approximated Registration Inferring Input
Kinect Point Cloud Our Output
Interpolated Mesh Our Output
Interpolated Kinect PC
Tablesmall Lean
Approximated Registration Inferring Input
Kinect Point Cloud Our Output
Interpolated Mesh Our Output
Interpolated Kinect PC
Video for Comparison Methods
Real-World Mesh Deformation
Visualization of Comparison Results
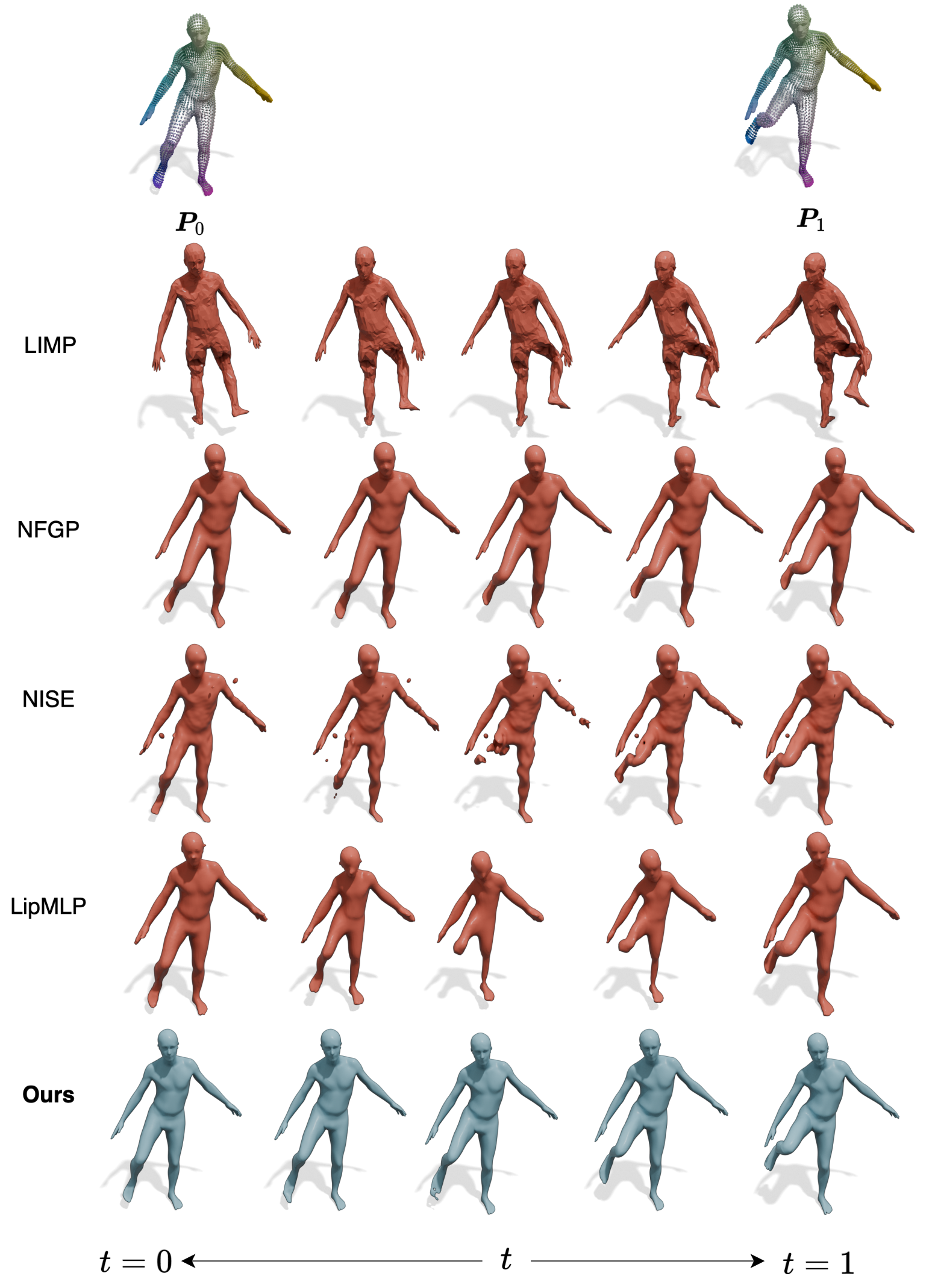
Visualization of the comparison method on 4D-Dress dataset.
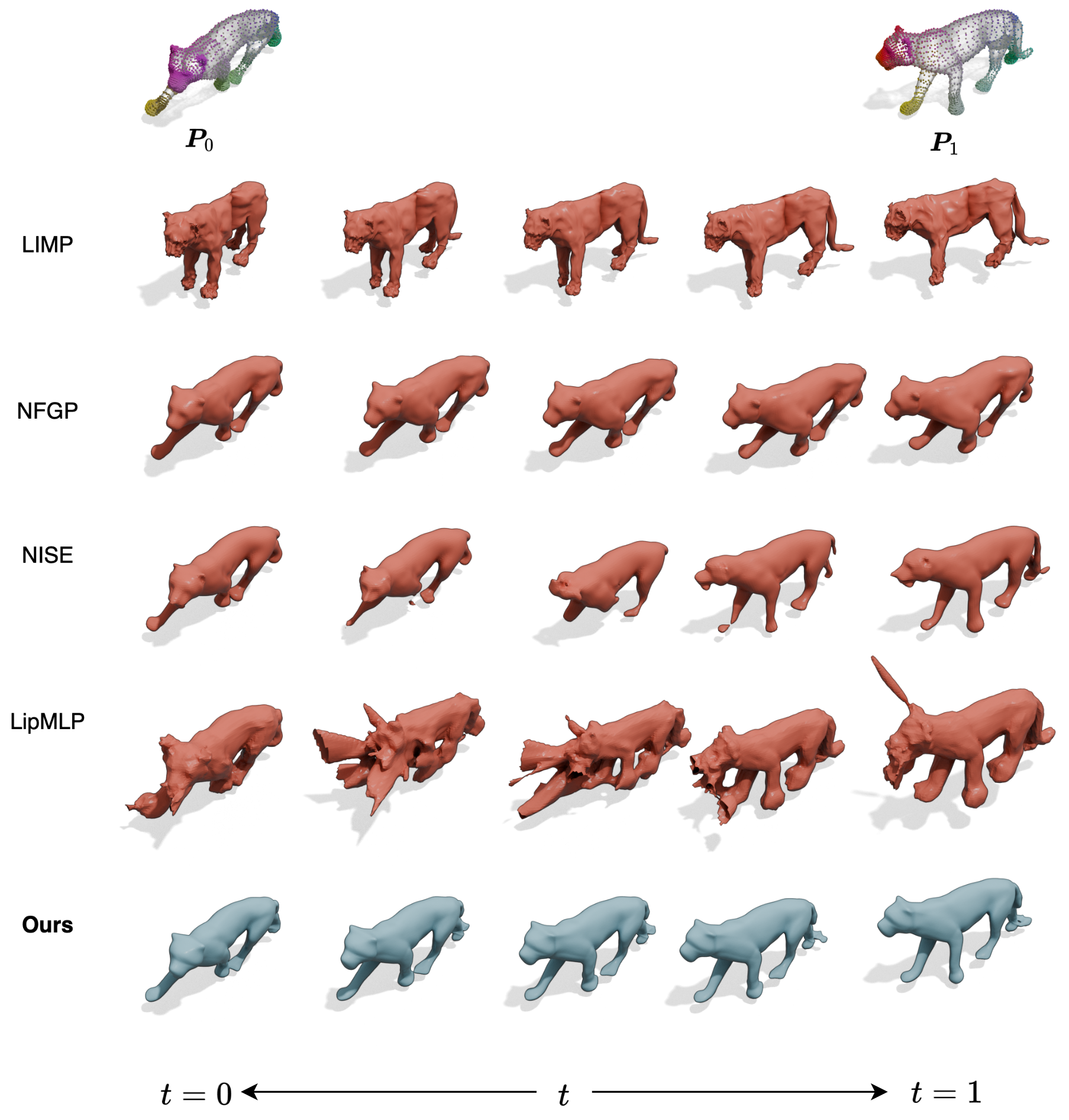
Visualization of the comparison method on SMAL dataset Lion category deformation.